
I sistemi robotici dipendono sempre più dalla visione artificiale avanzata per percepire, navigare e interagire con l’ambiente. Con l’aumento del numero e della risoluzione delle telecamere, la richiesta di collegamenti ad alta velocità e bassa latenza in grado di trasmettere e aggregare dati video real-time non è mai stata così grande. Il Gigabit Multimedia Serial Link (GMSL), originariamente sviluppato per applicazioni automotive, sta emergendo come una soluzione potente ed efficiente per i sistemi robotici. Il GMSL trasmette dati video ad alta velocità, segnali di controllo bidirezionali e alimentazione su un unico cavo, offrendo una lunga portata, una latenza deterministica a livello di microsecondi e un tasso di errore di bit (Bit Error Rate, BER) estremamente basso. Semplifica il cablaggio e riduce l’ingombro complessivo della soluzione, ideale per i robot incentrati sulla visione che operano in ambienti dinamici e spesso difficili.
Le sezioni seguenti illustrano dove e come vengono utilizzate le telecamere nella robotica, le sfide in termini di dati e connettività che queste applicazioni devono affrontare e come il GMSL possa aiutare i progettisti di sistemi a realizzare piattaforme robotiche scalabili, affidabili e ad alte prestazioni.
Dove vengono utilizzate le telecamere in robotica?
Le telecamere sono il cuore della percezione robotica moderna e consentono alle macchine di comprendere e rispondere all’ambiente circostante in tempo reale. Che si tratti di un robot di magazzino che naviga tra i corridoi, di un braccio robotico che smista i pacchetti o di un robot di servizio che interagisce con le persone, i sistemi di visione sono fondamentali per l’autonomia, l’automazione e l’interazione. Queste telecamere non sono solo diverse per funzione, ma anche per forma: a seconda del compito, sono montate su diverse parti del robot e sono adattate ai vincoli fisici e operativi della piattaforma (vedi Figura◦1).
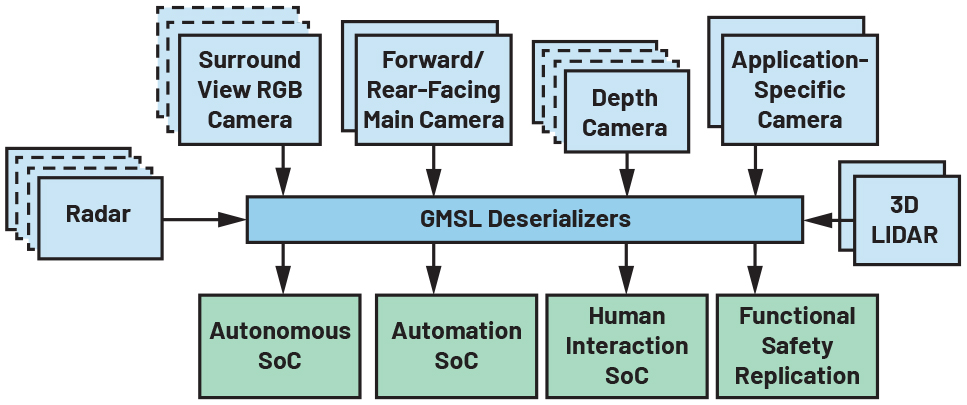
Figura◦1. Esempio di sistema di visione robotica multimodale abilitato da GMSL.
Autonomia nei sistemi mobili
Nella robotica autonoma, le telecamere sono gli occhi della macchina e le permettono di percepire l’ambiente circostante, evitare gli ostacoli e localizzarsi all’interno dell’ambiente stesso. Per i robot mobili, come quelli usati per le consegne, o navette nei magazzini, o rover agricoli, ciò comporta spesso una combinazione di telecamere ad ampio campo visivo posizionate agli angoli o alle estremità del robot stesso. Questi sistemi di visione panoramica (Surround View) forniscono una percezione a 360°, aiutando il robot a navigare in spazi complessi senza collisioni.
Altre applicazioni legate all’autonomia utilizzano telecamere rivolte verso il basso o verso l’alto per leggere marcatori di posizionamento su pavimenti, soffitti o pareti. Questi marcatori fungono da segnali visivi, consentendo ai robot di ricalibrare la propria posizione o di attivare azioni specifiche mentre si muovono in ambienti strutturati, come fabbriche o ospedali. Nei sistemi più avanzati, le telecamere di visione stereo o le telecamere a tempo di volo (Time of Flight, ToF) sono posizionate sulla parte anteriore o laterale del robot per generare mappe tridimensionali, stimare le distanze e contribuire alla localizzazione e alla mappatura simultanea (Simultaneous Localization and Mapping, SLAM).
La posizione di queste telecamere è spesso dettata dalle dimensioni del robot, dalla sua mobilità e dal campo visivo richiesto. Sui piccoli robot per le consegne sui marciapiedi, ad esempio, le telecamere possono essere nascoste in pannelli incassati su tutti e quattro i lati. Su un drone, invece, sono tipicamente rivolte in avanti per la navigazione e verso il basso per l’atterraggio o il tracciamento degli oggetti.
Automazione
Nell’automazione industriale, i sistemi di visione aiutano i robot a eseguire compiti ripetitivi o di precisione con velocità e regolarità. In questo caso, la telecamera può essere montata su un braccio robotico, accanto a una pinza o a un dispositivo finale, e il sistema può ispezionare visivamente, localizzare e manipolare gli oggetti con grande precisione. Ciò è particolarmente importante nelle operazioni di pick-and-place, dove è essenziale identificare l’esatta posizione e l’orientamento di un pezzo o di un pacchetto.
Altre volte, le telecamere sono fissate sopra un’area di lavoro, montate su un portale o su una linea aerea, per monitorare gli oggetti su un trasportatore o per scansionare i codici a barre. Negli ambienti di magazzino, i robot mobili utilizzano telecamere rivolte in avanti per rilevare le etichette degli scaffali, la segnaletica o i codici QR, consentendo l’assegnazione dinamica dei compiti o la modifica del percorso.
Alcuni robot di ispezione, in particolare quelli utilizzati nelle infrastrutture, nei servizi pubblici o nell’industria pesante, sono dotati di telecamere con zoom montate su pali o bracci articolati. Queste telecamere consentono di acquisire immagini ad alta risoluzione di cordoni di saldatura, passerelle portacavi o giunzioni di tubi, operazioni che per gli esseri umani sarebbero pericolose o richiederebbero molto tempo per essere eseguite manualmente.
Interazione umana
Le telecamere svolgono un ruolo centrale anche nel modo in cui i robot interagiscono con gli esseri umani. Nel settore manifatturiero, sanitario o dei servizi, i robot devono comprendere i gesti, riconoscere i volti e mantenere un senso di presenza sociale. I sistemi di visione rendono possibile tutto questo.
I robot umanoidi e di servizio sono spesso dotati di telecamere integrate nella testa o nel torace, imitando la linea visiva umana per consentire un’interazione naturale. Queste telecamere aiutano il robot a interpretare le espressioni facciali, a mantenere il contatto visivo o a seguire lo sguardo di una persona. Alcuni sistemi utilizzano telecamere di profondità o obiettivi fisheye per tracciare il movimento del corpo o rilevare quando una persona entra in uno spazio di lavoro condiviso.
Negli scenari di robot collaborativi (cobot), in cui l’uomo e la macchina lavorano fianco a fianco, la visione artificiale viene utilizzata per garantire sicurezza e reattività. Il robot può osservare l’avvicinarsi di arti o strumenti, regolando il proprio comportamento per evitare collisioni o interrompere il lavoro se qualcuno si avvicina troppo.
Anche nei sistemi tele-operati o semi-autonomi, la visione artificiale rimane fondamentale. Le telecamere montate frontalmente trasmettono video in diretta agli operatori remoti, consentendo il controllo o l’ispezione in real-time. A questo feed video possono essere aggiunte sovrapposizioni di realtà aumentata per assistere in attività come la diagnosi remota o la formazione.
In tutti questi ambiti, il posizionamento della telecamera, che sia su una pinza, un giunto cardanico, la base o la testa del robot, è una decisione di progettazione legata alla funzione, al fattore di forma e all’ambiente del robot stesso. Con l’aumento delle capacità e dell’autonomia dei sistemi robotici, il ruolo della visione si approfondirà e l’integrazione della telecamera diventerà ancora più sofisticata ed essenziale.
Sfide nella visione robotica
Man mano che i sistemi di visione diventano la spina dorsale dell’intelligenza robotica, opportunità e complessità crescono in parallelo. Le telecamere ad alte prestazioni dischiudono notevoli capacità, consentendo una percezione real-time, una manipolazione precisa e un’interazione umana più sicura, ma fanno anche crescere i requisiti dell’architettura di sistema. Non si tratta più solo di spostare rapidamente grandi volumi di dati video. Molti dei robot di oggi sono chiamati a prendere decisioni in una frazione di secondo sulla base di input multimodali dei sensori, il tutto operando all’interno di stretti involucri meccanici, gestendo i vincoli di potenza, evitando le interferenze elettromagnetiche (EMI) e mantenendo una rigorosa sicurezza funzionale in prossimità delle persone.
Queste sfide sono aggravate dagli ambienti che i robot devono affrontare. Un robot di magazzino può entrare e uscire dai congelatori, sopportando sbalzi di temperatura e condensa. Un rover agricolo può strisciare su campi non asfaltati, assorbendo costantemente urti e vibrazioni meccaniche. I robot di servizio negli ospedali o negli spazi pubblici possono incontrare ambienti sconosciuti e visivamente complessi, dove è necessario adattarsi rapidamente per navigare in sicurezza intorno a persone e ostacoli.
Risolvere le sfide con il GMSL
Il GMSL è al primo posto per soddisfare le esigenze dei moderni sistemi robotici. La combinazione di larghezza di banda, robustezza e flessibilità di integrazione lo rende adatto alle piattaforme ricche di sensori che operano in ambienti dinamici e a missione critica. Le seguenti caratteristiche evidenziano come il GMSL affronti le principali sfide legate alla visione nella robotica.
Alta velocità dei dati e latenza bassa
Le famiglie di prodotti GMSL2™ e GMSL3™ supportano velocità di trasmissione dati forward-channel (percorso video) di 3 Gbps, 6 Gbps e 12 Gbps, coprendo un’ampia gamma di casi d’uso della visione robotica. Queste velocità di collegamento flessibili consentono ai progettisti di sistemi di ottimizzare la risoluzione, la frequenza dei fotogrammi, il tipo di sensore e i requisiti di elaborazione (Figura 2).
Un collegamento a 3 Gbps è sufficiente per la maggior parte delle telecamere Surround View che utilizzano sensori a otturatore rotante da 2 MP a 3 MP a 60 fotogrammi al secondo (Frame Per Second, FPS). Supporta anche altre modalità di rilevamento comuni, come sensori ToF e unità LiDAR (Light Detection and Ranging) con uscite a nuvola di punti e sensori radar che trasmettono dati di rilevamento o immagini compresse.
La modalità a 6 Gbps è generalmente utilizzata per la telecamera principale del robot rivolta in avanti, dove sono necessari sensori a risoluzione più elevata (di solito 8 MP o più) per il rilevamento degli oggetti, la comprensione semantica o il riconoscimento dei segni. Questa velocità di trasmissione dei dati supporta anche i sensori ToF con uscita grezza o i sistemi di visione stereo che trasmettono l’uscita grezza di due sensori di immagine o il flusso di nuvole di punti elaborate da un processore di segnali di immagine integrato (Integrated Signal Processor, ISP). Molte telecamere stereo attualmente disponibili in commercio si affidano a questa velocità di trasmissione dati per ottenere prestazioni elevate in termini di frame-rate.
Nella fascia alta, i collegamenti a 12 Gbps consentono di supportare telecamere con risoluzione di 12 MP o superiore, utilizzate in applicazioni robotiche specializzate che richiedono una classificazione avanzata degli oggetti, la segmentazione della scena o la percezione a lungo raggio. È interessante notare che anche alcuni sensori a otturatore globale (global shutter) a bassa risoluzione richiedono collegamenti a velocità più elevata per ridurre il tempo di lettura ed evitare artefatti da movimento durante i cicli di acquisizione rapida; un aspetto critico in ambienti dinamici o ad alta velocità.
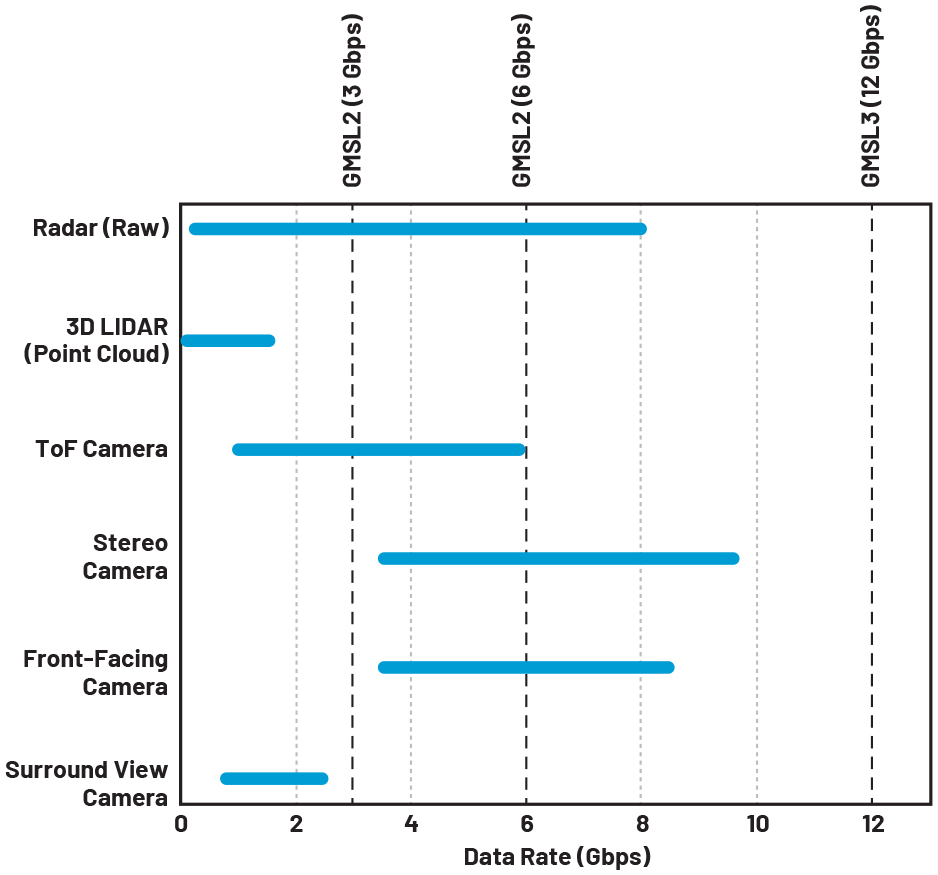
Figura 2. Intervalli di larghezza di banda dei sensori con capacità GMSL.
Poiché GMSL utilizza il duplexing nel dominio della frequenza per separare i canali forward (video e controllo) e reverse (controllo), consente una comunicazione bidirezionale con una latenza bassa e deterministica, senza il rischio di collisioni di dati. In tutte le velocità di collegamento, GMSL mantiene una latenza incredibilmente bassa: il ritardo aggiunto dall’ingresso di un serializzatore GMSL all’uscita di un deserializzatore è generalmente inferiore alle decine di microsecondi; trascurabile per la maggior parte dei sistemi di visione robotica in real-time. La latenza deterministica del canale inverso consente una precisa attivazione hardware dall’host alla telecamera, fondamentale per l’acquisizione sincronizzata di immagini da più sensori e per lo scatto di fotogrammi in base agli eventi in complessi flussi di lavoro robotici. Il raggiungimento di questo livello di precisione del timing con le telecamere USB o Ethernet richiede, in genere, l’aggiunta di una linea di trigger hardware separata, aumentando la complessità del sistema e del cablaggio.
Ingombro ridotto e basso consumo
Una delle principali proposte di valore del GMSL è la sua capacità di ridurre l’infrastruttura di cavi e connettori. Il GMSL stesso è un collegamento full-duplex e la maggior parte delle telecamere GMSL utilizza la funzione power-over-coax (PoC), che consente di trasmettere dati video, segnali di controllo bidirezionali e alimentazione su un unico sottile cavo coassiale. Ciò semplifica notevolmente il collegamento, riduce il peso complessivo e l’ingombro dei cablaggi e facilita l’instradamento meccanico nelle piattaforme robotiche compatte o articolate (Figura 3).
Inoltre, il serializzatore GMSL è un dispositivo altamente integrato che combina l’interfaccia video (ad esempio, MIPI-CSI) e la PHY GMSL in un unico chip. Il consumo di energia del serializzatore GMSL, tipicamente di circa 260 mW in modalità 6 Gbps, è favorevolmente basso rispetto a tecnologie alternative con un analogo throughput di dati. Tutte queste caratteristiche si tradurranno in spazi ridotti su scheda, riduzione dei requisiti di gestione termica (spesso eliminando la necessità di ingombranti dissipatori) e maggiore efficienza complessiva del sistema, in particolare per i robot alimentati a batteria.
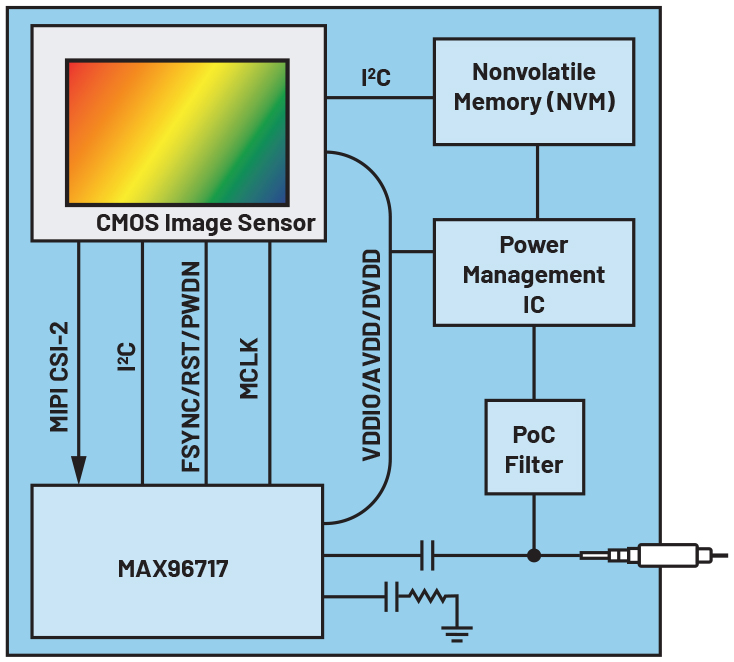
Figura 3. Tipica architettura di telecamera GMSL che utilizza il MAX96717.
Aggregazione di sensori e Routing dei dati video
I deserializzatori GMSL sono disponibili in diverse configurazioni, che supportano uno, due o quattro collegamenti di ingresso, consentendo architetture flessibili di aggregazione di sensori. Ciò consente ai progettisti di collegare più telecamere o moduli sensore a una singola unità di elaborazione senza ulteriori switch o multiplexing esterno, il che è particolarmente utile nei sistemi robotici multicamera.
Oltre agli ingressi multipli, GMSL SERDES supporta anche funzioni avanzate per gestire e instradare i dati in modo intelligente all’interno del sistema. Queste includono:
- Diffusione (broadcasting) I2C e GPIO per la configurazione simultanea dei sensori e la sincronizzazione dei frame.
- Aliasing degli indirizzi I2C per evitare conflitti di indirizzi I2C in modalità passthrough.
- Riassegnazione dei canali virtuali, che consente la mappatura pulita di più flussi video nel frame buffer all’interno dei sistemi su chip (System on Chip, SoC).
- Duplicazione del flusso video e filtraggio dei canali virtuali, per consentire la trasmissione di dati video selezionati a più SoC, ad esempio per supportare pipeline di automazione e interazione dalla stessa telecamera o per supportare percorsi di elaborazione ridondanti per una maggiore sicurezza funzionale.
Sicurezza e affidabilità
Originariamente sviluppato per applicazioni di sistemi avanzati di assistenza alla guida (Advanced Driver Assistance System, ADAS) in ambito automotive, il GMSL è stato testato sul campo in ambienti in cui la sicurezza, l’affidabilità e la robustezza sono irrinunciabili. I sistemi robotici, in particolare quelli che operano a contatto con le persone o che svolgono attività industriali di importanza strategica, possono beneficiare degli stessi standard elevati.
Tabella 1. GMSL, USB ed Ethernet a Confronto: Compromessi Nella Visione Robotica
| Caratteristica/Criteri | GMSL (GMSL2/GMSL3) | USB (ad esempio, USB 3.x) | Ethernet (ad esempio, GigE Vision) |
| Tipo di cavo | Singolo coassiale o STP (dati + alimentazione + controllo) | USB + alimentazione + general-purpose input/output (GPIO) Separati | Ethernet + alimentazione (PoE opzionale) + GPIO Separati |
| Lunghezza massima | Più di 15 metri con cavo coassiale | Affidabile fino a 3 m | 100 m con Cat5e/Cat6 |
| Alimentazione | Integrata (PoC) | Separata o USB-PD | Richiede Infrastruttura PoE o cavo separato |
| Latenza (Tipica) | Decine di microsecondi (deterministica) | A livello di millisecondo, dipendente da OS | A livello di millisecondo, con buffer + stack OS/network |
| Velocità di trasmissione | 3 Gbps/6 Gbps/12 Gbps (non compresso, per link) | Fino a 5 Gbps (USB 3.1 Gen 1) | 1 Gbps (GigE), 10 Gbps (10 GigE, non comune in robotica) |
| Compressione video | Non necessaria (uscita grezza o ISP) | A volte necessaria per le risoluzioni più alte | A volte necessaria |
| Supporto del Trigger Hardware | Integrato sul canale di ritorno (nessun collegamento extra) | Richiede GPIO supplementare o interfaccia communications device class (CDC) su USB | Richiede GPIO supplementare o sync box |
| Aggregazione di sensori | Nativa con deserializzatore multi-input | Tipicamente punto-punto | Tipicamente punto-punto |
| Robustezza EMI | Alta — progettata per standard EMI automotive | Media | Medio – alta (dipende da schermatura, layout) |
| Adattabilità all’ambiente | Temperature di grado Automotive, rinforzata | Livello consumer se non è rinforzata | Varia (esistono opzioni industriali) |
| Stack Software | Integrazione diretta MIPI-CSI con SoC | Stack driver OS + video device class USB (UVC) o kit di sviluppo software proprietario (SDK) | Stack driver OS + GigE Vision/ GenICam |
| Supporto alla sicurezza funzionale |
Dispositivi ASIL-B, replica dei dati, sincronizzazione deterministica | Minima | Minima |
| Sviluppo ecosistema |
Maturo in ADAS, in crescita nella robotica | Diffuso nel settore consumer/PC, opzioni industriali limitate | Maturo nella visione industriale |
| Complessità di integrazione | Media — richiede SERDES e configurazione del routing | Bassa — plug and play per sviluppo Elevata — per la produzione | Media — richiede configurazione di switch/router e cablaggio di sincronizzazione |
La maggior parte dei serializzatori e deserializzatori GMSL sono qualificati per operare in un intervallo di temperatura compreso tra -40°C e +105°C, con un’equalizzazione adattiva integrata che monitora e regola continuamente le impostazioni dei transceiver in risposta ai cambiamenti ambientali. Ciò offre ai progettisti di sistemi la flessibilità di progettare robot che funzionano in modo affidabile in condizioni di temperatura estreme o fluttuanti.
Inoltre, la maggior parte dei dispositivi GMSL è conforme allo standard ASIL-B e presenta BER estremamente bassi. In condizioni di collegamento conformi, il GMSL2 offre un BER tipico di 10-15, mentre il GMSL3, con la sua correzione anticipata degli errori (Forward Error Correction, FEC) obbligatoria, può raggiungere un BER di 10-30. Questa eccezionale integrità dei dati, unita alla certificazione di sicurezza, semplifica notevolmente l’integrazione della sicurezza funzionale a livello di sistema.
In definitiva, la robustezza del GMSL riduce i tempi di fermo, i costi di manutenzione e aumenta la fiducia nell’affidabilità del sistema a lungo termine; vantaggi fondamentali per le applicazioni di robotica industriale e di servizio.
Ecosistema maturo
GMSL si avvale di un ecosistema maturo e pronto per l’implementazione, plasmato da anni di utilizzo ad alto volume nei sistemi automotive e supportato da un’ampia rete di partner globali dell’ecosistema. Questo include un portafoglio completo di telecamere, sia di valutazione che pronte per la produzione, schede di calcolo, cavi, connettori e supporto software/driver; tutti testati e convalidati in rigorose condizioni reali. Per gli sviluppatori di robotica, questo ecosistema si traduce in cicli di sviluppo più brevi, integrazione semplificata e una barriera più bassa alla scalabilità, dal prototipo alla produzione.
Il GMSL e la connettività di visione robotica di generazione precedente
Negli ultimi anni, superando il confine dell’industria automotive il GMSL è diventato sempre più accessibile, aprendo nuove possibilità per i sistemi robotici ad alte prestazioni. Con l’aumento delle richieste di visione robotica, con un maggior numero di telecamere, una risoluzione più elevata, una sincronizzazione con tolleranze più strette e ambienti più difficili, le interfacce tradizionali come USB ed Ethernet si rivelano spesso insufficienti in termini di larghezza di banda, latenza e complessità di integrazione. Il GMSL sta emergendo come percorso di aggiornamento preferito, offrendo una soluzione robusta, scalabile e pronta per la produzione che sta gradualmente sostituendo USB ed Ethernet in molte piattaforme robotiche avanzate. La Tabella 1 mette a confronto le tre tecnologie per quanto riguarda i parametri chiave della progettazione della visione robotica.
Conclusione
Man mano che la robotica si sposta in ambienti sempre più esigenti e su diversi casi d’uso, i sistemi di visione devono evolversi per supportare un numero più elevato di sensori, una maggiore larghezza di banda e prestazioni deterministiche. Anche se le soluzioni di connettività tradizionali rimarranno importanti per lo sviluppo e per alcuni scenari di implementazione, esse introducono compromessi in termini di latenza, sincronizzazione e integrazione del sistema, che ne limitano la scalabilità. Il GMSL, con la sua combinazione di alta velocità di trasmissione dati, lunga portata via cavo, alimentazione integrata e bassa latenza deterministica bidirezionale, fornisce una base solida per la costruzione di sistemi di visione robotica scalabili. Adottando il GMSL, i progettisti possono accelerare la transizione dal prototipo alla produzione, fornendo robot più intelligenti e affidabili, pronti ad affrontare le sfide di un’ampia gamma di applicazioni reali.
Kainan Wang, Systems Applications Engineer, Analog Devices